Physics-informed neural network enabled high-fidelity compressive phase-shifting fringe projection profilometry
Bozhang Cheng
1
,
Yunhua Yao
1,*

,
Yu He
1
,
Mengdi Guo
1
,
Hongmei Ma
1
,
Dalong Qi
1
,
Yuecheng Shen
1
,
Lianzhong Deng
1
,
Zhenrong Sun
1
,
Shian Zhang
1,2,*
*Correspondence to:
Yunhua Yao, State Key Laboratory of Precision Spectroscopy, School of Physics, East China Normal University, Shanghai 200241, China.
E-mail: yhyao@lps.ecnu.edu.cn
Shian Zhang, State Key Laboratory of Precision Spectroscopy, School of Physics, East China Normal University, Shanghai 200241, China. E-mail: sazhang@phy.ecnu.edu.cn
Shian Zhang, State Key Laboratory of Precision Spectroscopy, School of Physics, East China Normal University, Shanghai 200241, China. E-mail: sazhang@phy.ecnu.edu.cn
Light Manip Appl. 2026;1:202613. 10.70401/lma.2026.0014
Received: April 09, 2026Accepted: June 05, 2026Published: June 05, 2026
Abstract
Phase-shifting profilometry (PSP), as a high-precision and low-cost three-dimensional (3D) profile measurement technique, has been extensively applied in diverse fields. By introducing the compressive sensing paradigm, compressive phase-shifting fringe projection profilometry (CPSFPP) provides an effective solution for high-speed dynamic object acquisition. Nevertheless, achieving high-fidelity dynamic profile reconstruction from compressed measurements remains a considerable challenge, owing to the inherent information loss in compressive sampling and limitations in computational reconstruction, especially under high compression ratios. To address this issue, we propose a physics-informed neural network (PINN)-based computational imaging framework for high-fidelity CPSFPP, named PINN-CPSFPP. This method integrates the physical model constraints with neural network learning to guarantee high-fidelity reconstruction even at high compression ratios. We perform numerical simulations to verify the reconstruction accuracy of PINN-CPSFPP under different compression ratios and experimentally validate the method by measuring translational, rotational, and deformed objects. The results demonstrate that the measurement speed is increased by nine times compared with conventional PSP. Benefiting from its robust 3D imaging performance, PINN-CPSFPP serves as a high-fidelity metrological tool for high-speed 3D scenarios and exhibits promising application prospects in a wide range of basic and applied disciplines.
Keywords
Fringe projection profilometry, compressive sensing, 3D measurement, image reconstruction
1. Introduction
Fringe projection profilometry (FPP)[1,2] has emerged as a fundamental optical metrology technique for three-dimensional (3D) shape measurement. By projecting fringe patterns onto the object’s surface and retrieving the phase from the distorted patterns modulated by the height variations, FPP has provided an efficient and non-contact tool to acquire 3D geometry. Its advantages in accuracy, flexibility, and cost-effectiveness have established FPP as a prevalent technique across diverse applications, including industrial inspection[3], cultural heritage documentation[4], and biomedicine[5]. With the development of structured-light metrology, FPP has evolved into a broad area of methods with different phase demodulation, coding, and reconstruction strategies. For example, Fourier transform profilometry enables single-frame phase retrieval through spatial-frequency analysis and is suitable for dynamic measurement[6]. Moiré profilometry[7], including computer-generated Moiré profilometry[8] and computer-generated frequency-carrier Moiré profilometry[9], exploits fringe-beating or numerically generated reference fringes to obtain surface contours. Other approaches, such as modulation measuring profilometry[10], phase-differencing profilometry[11] and empirical mode decomposition-based profilometry[12], further extend the ability of FPP to handle complex surfaces, discontinuities or nonstationary fringe signals. Video-projection-based profilometry has promoted real-time 3D measurement using digital projectors and high-speed cameras[13,14]. More recently, deep-learning-based profilometry, including FPP by multi-attention fringe restoration network[15], deep Bayesian inference based profilometry[16], has provided new routes for improving robustness, speed, and generalization capability.
Among various FPP strategies, phase-shifting profilometry (PSP)[17] is widely favored due to its superior precision[18]. However, this high precision is inherently coupled with a trade-off in temporal resolution, as the measurement speed of PSP is constrained by the sequential switching of the phase-shifted projection patterns. To improve the imaging speed of PSP, extensive efforts have been devoted to enhancing 3D measurement capabilities for dynamic scenes. The strategies to accelerate structured illumination switching include binary defocusing to boost the effective refresh rate of digital micromirror devices (DMD)[19,20], as well as customized high-speed light engines[21,22]. By learning the nonlinear mapping from fringes to phase, Feng et al. proposed a convolutional neural network method that can directly demodulate distorted fringes with high speed and accuracy[23]. Composite and dual-frequency composite FPP combined with deep learning employ spatial frequency multiplexing coding strategies to achieve 3D measurement at a speed of 100 kHz[24-26]. Additionally, physics-informed fringe analysis networks improve generalization capabilities, reduce data requirements[27], and optimize phase unwrapping[28], demonstrating great potential for high-speed 3D measurements of complex objects. Some methods aim to reduce the number of required images by employing compressed sensing (CS) theory[29]. CS offers a powerful framework for accelerating imaging beyond Nyquist limits by exploiting signal sparsity in transform domains. This approach has been successfully applied in high-speed microscopy[30,31], ultrafast photography[32], and hyperspectral imaging[33]. A representative snapshot compressive imaging technique is coded aperture compressive temporal imaging (CACTI), which was proposed to capture multiple temporal frames within a single camera exposure time[34]. In CACTI, dynamic scenes are modulated by time-varying coded apertures and temporally integrated into one compressed measurement. The underlying image sequence is then recovered by solving an underdetermined inverse problem with sparsity priors and regularization constraints. Inspired by CACTI, compressive phase-shifting fringe projection profilometry (CPSFPP)[35] encodes multiple phase-shifted distorted fringes into a single compressed image and recovers them by solving the inverse problem within an alternating direction method of multipliers (ADMM) framework[36]. However, the increase in the compression ratio, which is necessary for capturing faster dynamic scenes, exacerbates the ill-conditioned nature of this inverse problem. Consequently, the reconstructed fringes become susceptible to noise and abrupt surface variations, leading to discernible artifacts and phase errors that compromise the quality of 3D reconstruction. To overcome these challenges and achieve high-fidelity high-speed 3D metrology, here we propose a physics-informed neural network (PINN) approach for CPSFPP. Rather than reconstructing phase-shifted fringes through iterative optimization, our method extracts the distorted fringes utilizing a PINN with random input. The inherent architecture of this network acts as a powerful prior, promoting the reconstruction of natural and smooth fringe patterns. Network parameters are optimized by minimizing a physics-informed loss function, which rigorously enforces consistency with the compressed measurements. This approach deeply integrates the physical priors of CPSFPP directly into the reconstruction process. PINN-CPSFPP novelly integrates physical consistency, implicit neural priors, and explicit regularization within a unified framework to effectively address reconstruction challenges under high compression ratios. A significant advantage of PINN-CPSFPP is its adaptability to diverse scenes and system configurations without the need for extensive labeled datasets, owing to the untrained nature of the networks.
2. Methods
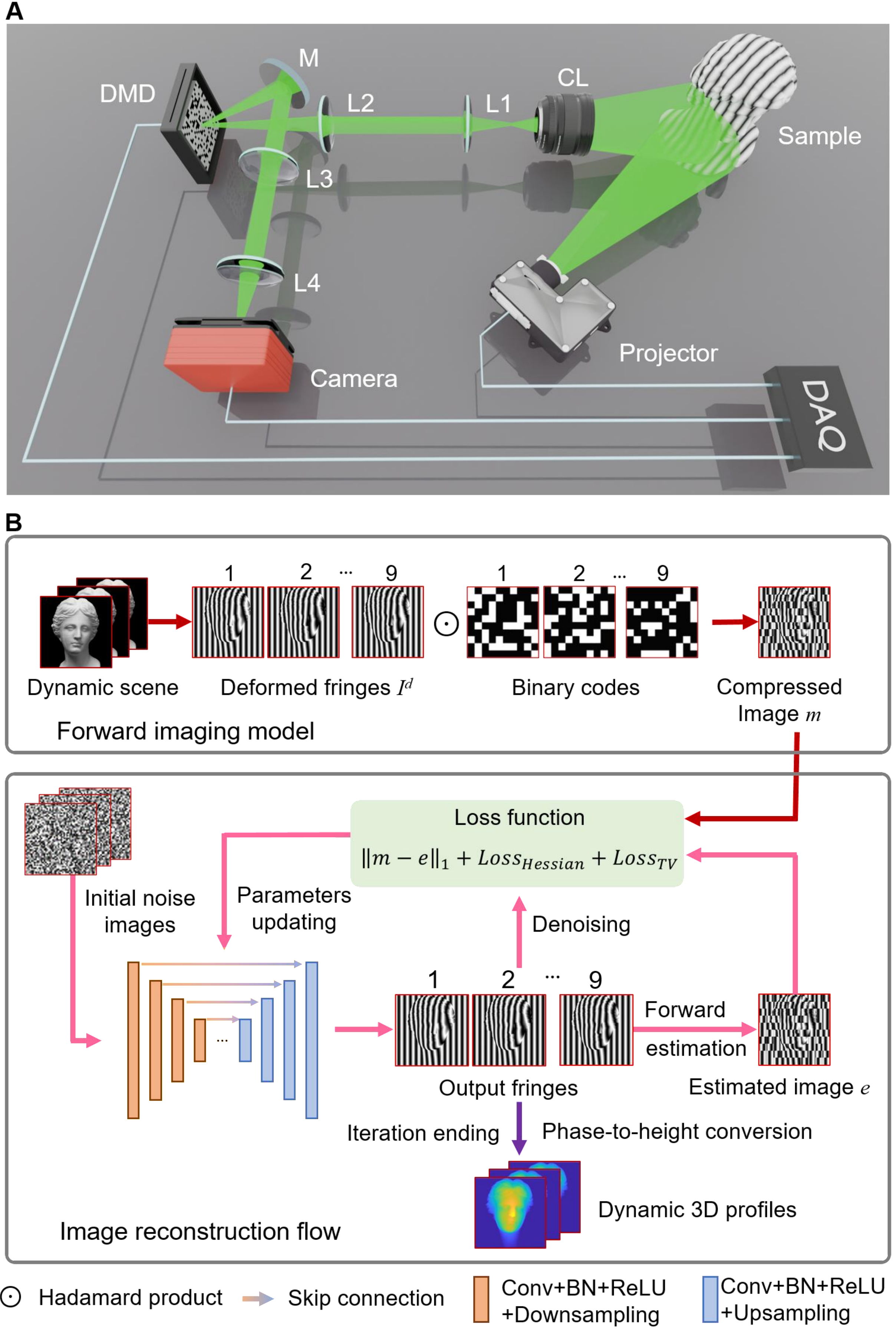
The experimental setup of PINN-CPSFPP is illustrated in Figure 1A. A digital light processing (DLP, FLDISCOVERY, F3010) projector is utilized to generate phase-shifted sinusoidal fringe patterns. These patterns are projected onto the dynamic scene. Subsequently, the deformed fringe patterns, modulated by the sample’s surface topography, are collected by a camera lens (CL, Nikon, AF NIKKOR 50 mm f/1.4D). Adopting a three-step phase-shifting method, the deformed fringe patterns Id on the sample surface can be represented as
{kind=link}
Figure 1. The experiment setup diagram and the data processing procedure of PINN-CPSFPP. (A) Experimental setup; (B) The forward imaging model and the imaging reconstruction flow of PINN-CPSFPP. CL: camera lens; L1-L4: lens; M: mirror; DMD: digital micromirror device; DAQ: data acquisition device; PINN: physics-informed neural network; CPSFPP: compressive phase-shifting fringe projection profilometry.
where AP(x, y, t) is the average value of the projected intensity, and BP(x, y, t) is the amplitude value.
where m(x, y) is the compressed image recorded by the camera, and C(x, y, n, t) is the spatial encoding patterns applied by the DMD, T is the spatial-temporal integration operator to sum the modulated images, and A represents the overall operator. To acquire the 3D dynamic profiles, the distorted fringes need to be first restored from the compressed image.
In order to solve the inverse problem, we introduce the concept of deep image prior[37] combined with physical model to construct a PINN framework, which has been proven to be a versatile tool for image reconstruction tasks in computational imaging areas such as ghost imaging[38], digital holography[39], and super-resolution microscopy[40]. The flowchart of the image reconstruction process is shown in Figure 1B. A stack of random initial noise images z is first generated as the input of a U-net with skip connections to acquire the deformed fringes R = fθ(z), where θ denotes the network parameters, and fθ denotes its data process.
Following the forward imaging model of CPSFPP, an estimated compressed measurement e = Afθ(z) is obtained based on the output of the network. The difference between the measured image and the estimated measurement is then calculated to judge the reconstruction fidelity. To further improve robustness against noise, two regularization terms, total variation (TV)[41] and Hessian[42], are introduced to constrain the parameter optimization of the network. Generally, the image reconstruction problem can be converted into a parameter optimization task which conforms to the following loss function:
where m is the matrix representation of the collected image, LossTV and LossHessian denote loss terms for TV and Hessian denoisers, Exx, Eyy, Exy represent discrete second-order derivatives along horizontal, vertical, and diagonal directions respectively[43], and ∇x and ∇y are the Nabla operators which are used to represent the gradient of a matrix in the x and y directions[44]. The TV loss enforces piecewise-smooth fringes and removes high-frequency noise, while the Hessian loss leverages second-order continuity to preserve curved fringes and suppress artifacts. The final goal of PINN is to search for the optimal parameters of the network and then output the fringe patterns, which can be expressed as:
where R* is the final fringes, and θ* is the final network parameter. After the PINN iteration stops, the reconstructed deformed fringes R* are output, and then the wrapped phase corresponding to the object’s height can be precisely extracted using established methods[6]:
where i represents any integer between 1 and 7, and this equation means any three consecutive images selected from reconstructed deformed fringes can be applied to calculate the wrapped phase
where l is a period order to align the wrapped and absolute phase. Since the phase extracted by the arctangent operation is wrapped within (-π, π], phase unwrapping is required to recover the continuous absolute phase. In fringe projection profilometry, phase unwrapping methods can be broadly classified into spatial phase unwrapping (SPU) and temporal phase unwrapping (TPU). SPU estimates the fringe order according to spatial phase continuity, including quality-guided methods[45], branch-cut methods[46], rhombus-type path-following methods[47], and curtain-type path-following methods[48]. TPU determines the fringe order by projecting additional encoded patterns or multi-frequency fringes, including dual-wavelength or heterodyne methods[49], Gray-code methods[50], binary-coding methods[51], fringe-amplitude encoding methods[52], phase-coding methods[53], phase-shift-coding methods[54], phase-shift-coding division multiplexing methods[55], phase-intensity hybrid encoding methods[56], symmetric multi-level Gray-code methods[57], and order-shifting methods[58]. In this work, we adopt a quality-guided SPU algorithm. Beyond the TV and Hessian denoisers, the neural network can capture statistics priors of low-level images, thereby acting as a strong prior that restricts the solution space with precise details[59]. This architectural bias may rule out some spurious solutions which satisfy the data term but don’t resemble natural sinusoidal fringes. Conversely, the ADMM framework frequently introduces over-smoothing, which can obliterate subtle phase details, particularly under high compression ratio conditions.
3. Results
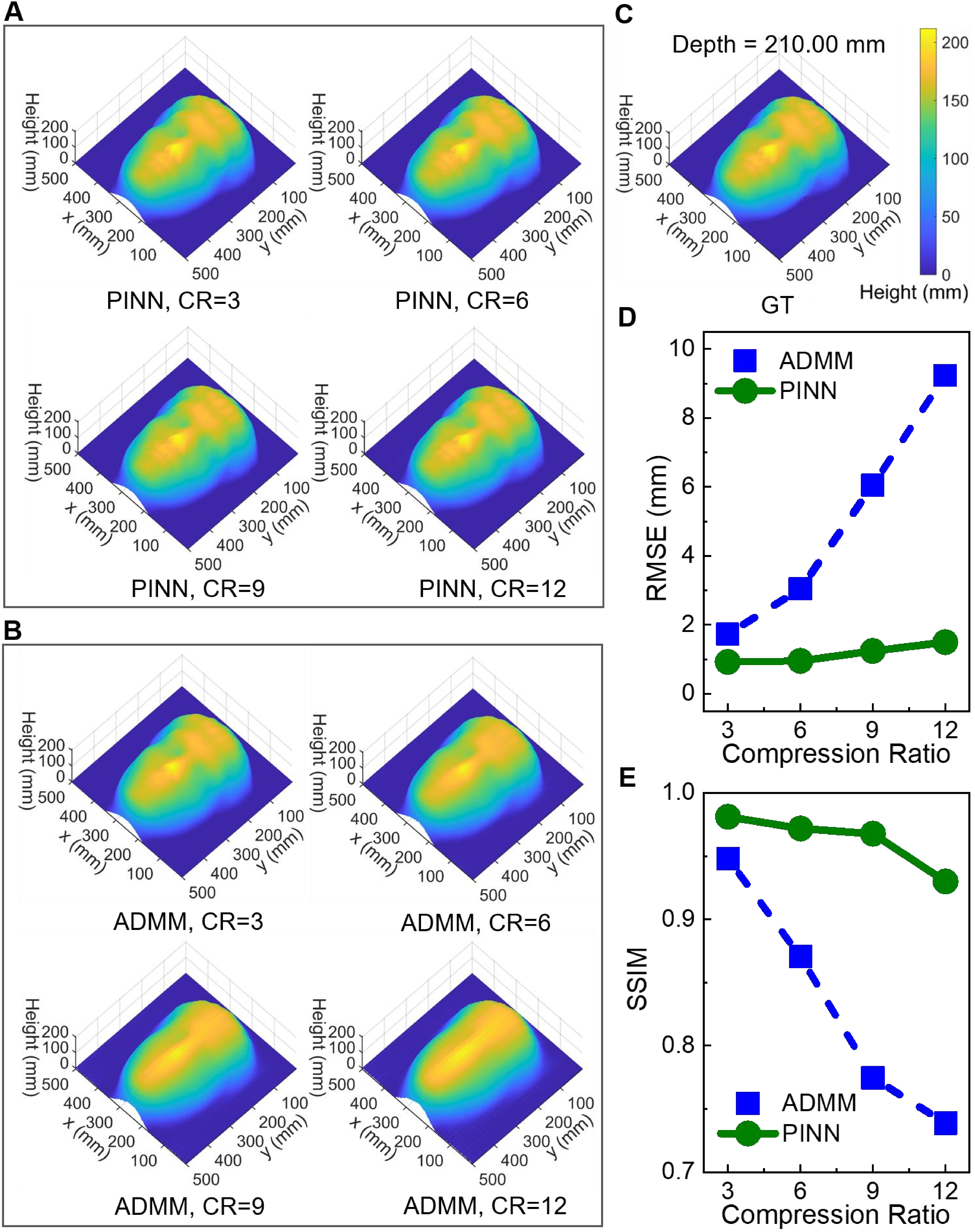
To characterize the 3D metrology capabilities of PINN-CPSFPP, we conducted a comparative simulation against the conventional ADMM framework with TV and DRUNet denoisers[60], following our previous work[35]. This simulation was performed under varying compression ratios (CR = 3, 6, 9, 12) for a dynamic scene involving a moving Roman Head, which possessed a maximum depth of 210.00 mm. The simulation results are presented in Figure 2. Specifically, Figure 2A,B display the 3D profiles reconstructed by PINN and ADMM, respectively, across various compression ratios. Figure 2C illustrates the ground truth profile. The impact of compression ratio on reconstruction quality is evaluated using root mean square error (RMSE) and structural similarity index measure (SSIM), as shown in Figure 2D,E. At a CR of 3, both methods yield comparable reconstruction quality. However, as the compression ratio increases, the profiles reconstructed by the ADMM exhibit pronounced over-smoothing and distortion, characterized by a significant loss of facial details and a degradation in image quality parameters. In contrast, the PINN reconstructions maintain high fidelity to the ground truth, achieving lower RMSE and higher SSIM values. Even at CR = 12, the reconstructed profile by PINN shows only mild blurring and a slight reduction in quality parameters, which remains acceptable. The simulation experiment is conducted in an environment of Python 3.7.16, NumPy 1.21.5, Matplotlib 3.5.3 and Scikit-image 0.19.2 on a compute server equipped with Intel i9-10920X CPU, 192 GB RAM and RTX 3090-24 GB GPU.
{kind=link}
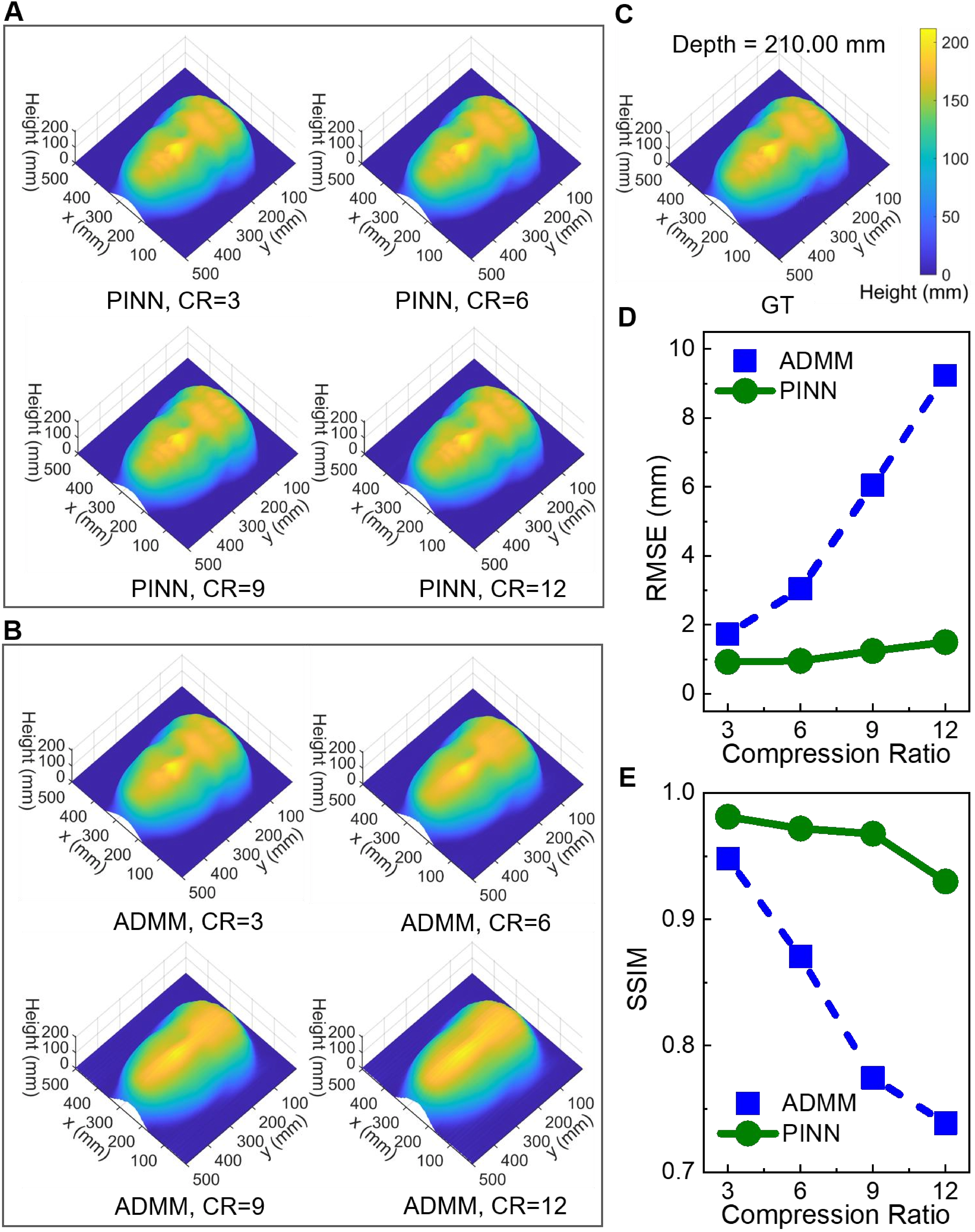
Figure 2. Simulation results of 3D profile reconstructions by PINN and ADMM under different compression ratios. (A) PINN reconstructions under CR = 3, 6, 9, 12 respectively; (B) ADMM reconstructions under CR = 3, 6, 9, 12 respectively; (C) The ground truth profile; (D and E) The dependence of RMSE and SSIM on compression ratio. PINN: physics-informed neural network; ADMM: alternating direction method of multipliers; RMSE: root mean square error; SSIM: structural similarity index measure.
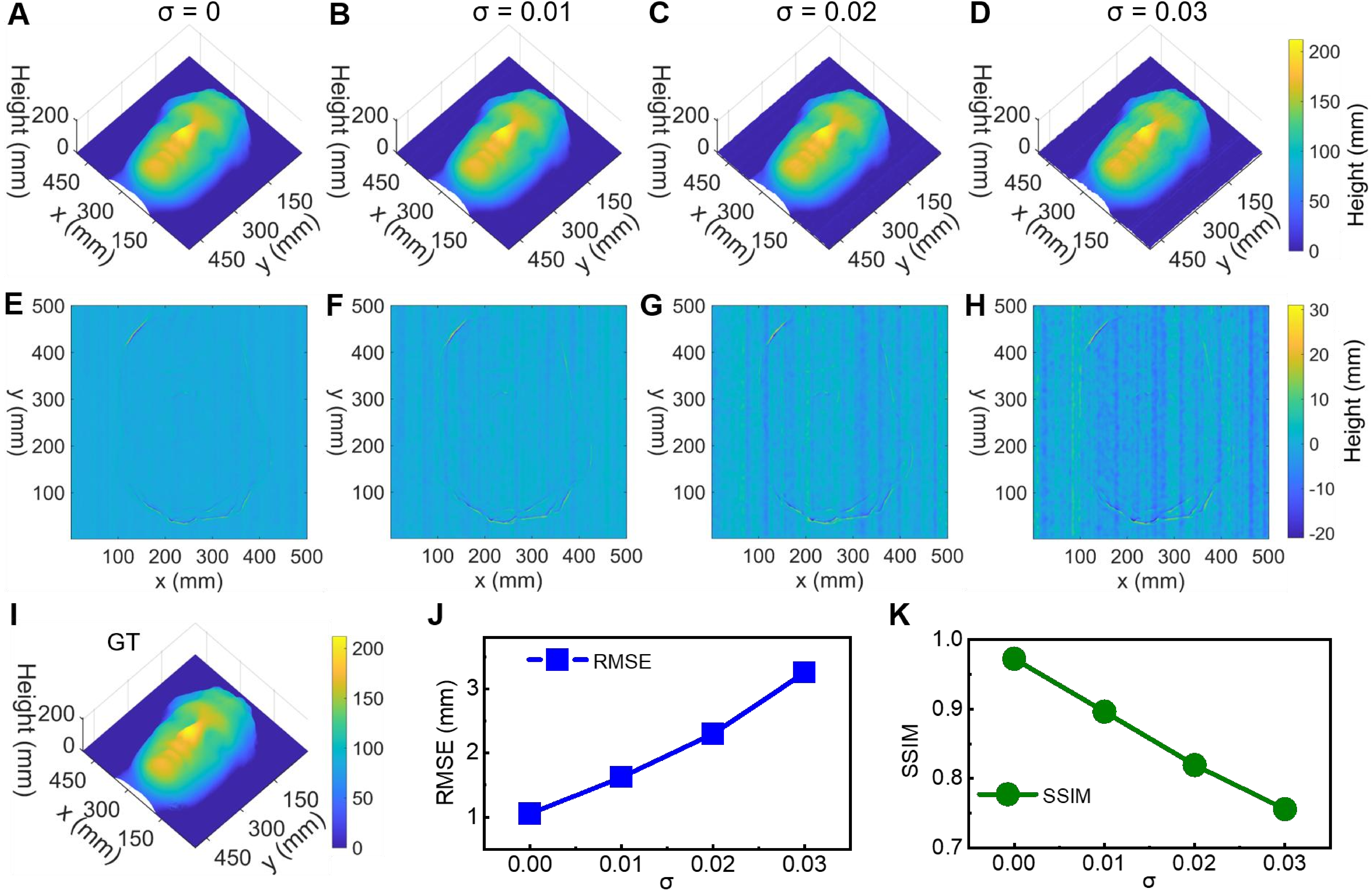
In addition to the compression ratio, measurement noise is another important factor affecting the accuracy of 3D shape recovery. To evaluate the noise robustness of PINN-CPSFPP, we carried out a simulation study using a Greek Prince bust with a depth range of 210.0 mm as the target object. Gaussian noise with standard deviations of 0, 0.01, 0.02, and 0.03 was added to the compressed measurement, and the corresponding 3D profiles were reconstructed using PINN-CPSFPP. The reconstructed surfaces under different noise levels are presented in Figure 3A,B,C,D, while the corresponding error maps are shown in Figure 3E,F,G,H. To further quantify the noise performance, the ground truth surface of the Greek Prince bust is presented in Figure 3I, and the RMSE and SSIM values versus noise standard deviation are plotted in Figure 3J,K, respectively. As shown in Figure 3A,B,C,D,E,F,G,H, PINN-CPSFPP can stably recover the overall 3D profile of the Greek Prince bust under noise-free and low-noise conditions, while preserving good surface continuity and relatively rich high-frequency details. As the noise level increases, wave-like artifacts gradually appear in the reconstructed results, and the error distribution becomes more widespread. This degradation is mainly caused by noise propagation through both the underdetermined reconstruction process and the subsequent phase-unwrapping step. The quantitative curves in Figure 3J,K show that RMSE increases gradually whereas SSIM decreases with increasing noise standard deviation. Nevertheless, even at relatively high noise levels, PINN-CPSFPP still recovers the main 3D shape correctly, without severe phase discontinuities or large-scale distortions. Overall, these results demonstrate that PINN-CPSFPP maintains stable reconstruction performance under noisy compressed measurements and exhibits good robustness to measurement noise.
{kind=link}
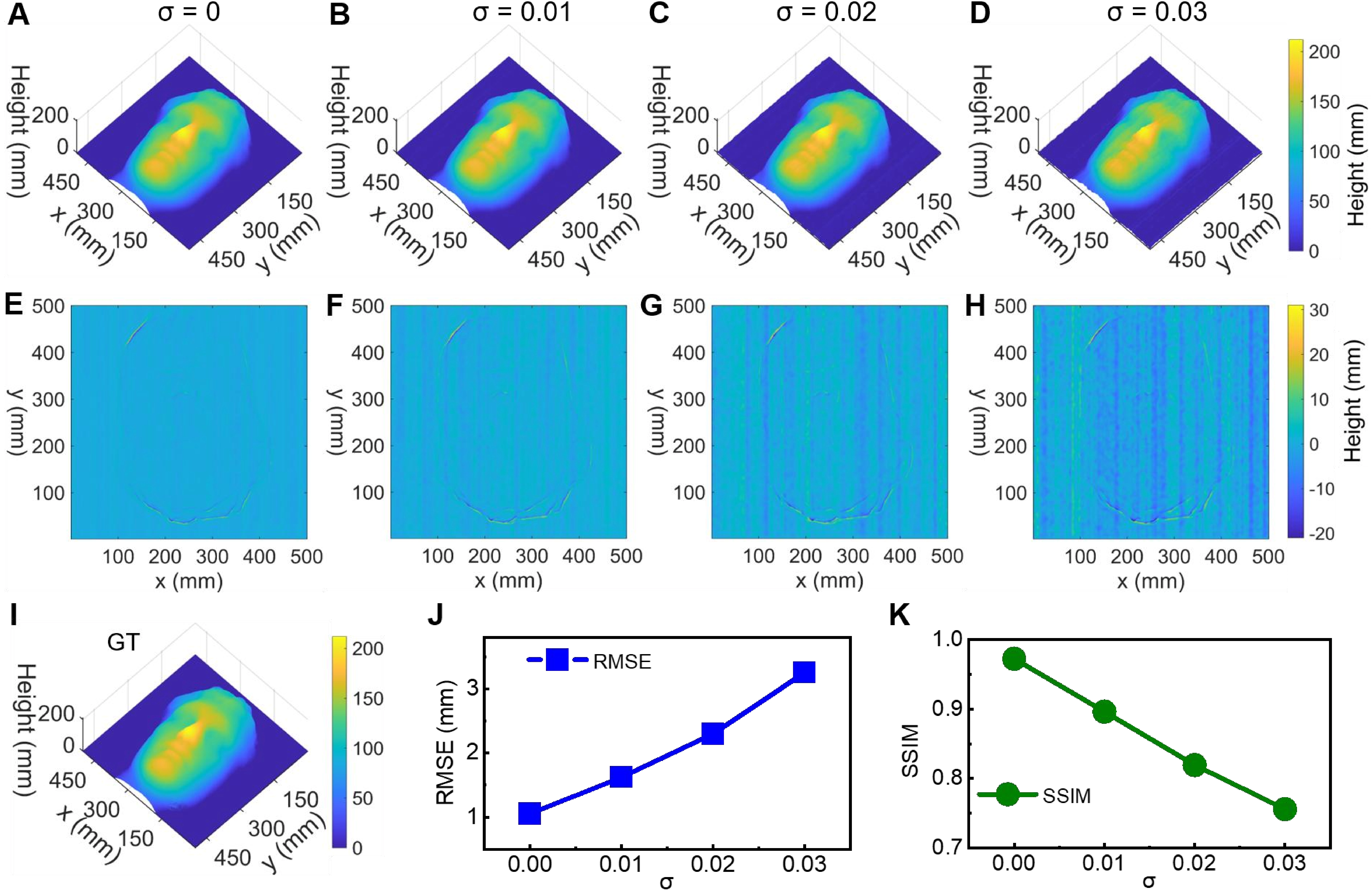
Figure 3. Comparison of the simulation results under different noise conditions. (A-D) Reconstructed 3D profiles under Gaussian noise with standard deviations of 0, 0.01, 0.02, and 0.03, respectively; (E-H) Reconstruction error maps under Gaussian noise with standard deviations of 0, 0.01, 0.02, and 0.03, respectively; (I) Ground-truth surface of the Greek Prince bust; (J) RMSE values of the reconstructed profiles at different noise levels; (K) SSIM values of the reconstructed profiles at different noise levels. RMSE: root mean square error; SSIM: structural similarity index measure.
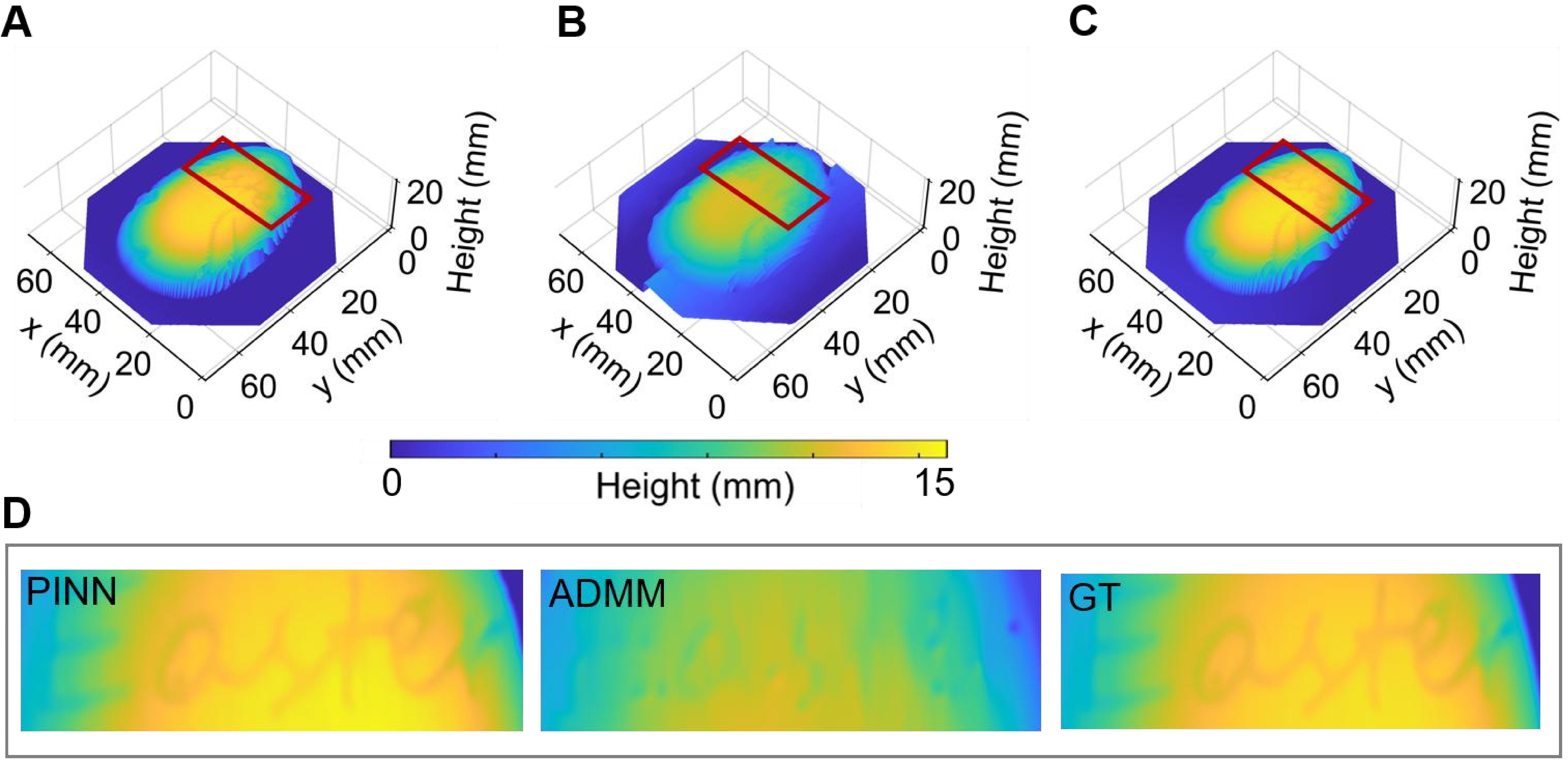
To further validate the practical performance of PINN-CPSFPP, we conducted experiments with acquisition configurations optimized based on simulation results. Given that a CR of 9 demonstrated a favorable balance between measurement speed and reconstruction fidelity, all compressed measurements were performed at this CR. Each sinusoidal fringe and binary coding pattern was exposed for 25 ms, while the camera’s exposure time was set to 225 ms to integrate a single compressed image. The first experiment involved a quantitative evaluation using a static plaster relief engraved with the phrase “Happy Easter” (depth = 15.00 mm). This sample was measured using CPSFPP, and the profiles were reconstructed using both PINN and the ADMM framework, as depicted in Figure 4A,B, respectively. A ground truth profile, illustrated in Figure 4C, was established by projecting ten-step phase-shifting fringes and reconstructing the profile with the conventional PSP method. Against this reference, PINN achieves an RMSE of 0.37 mm and an SSIM of 0.86, significantly outperforming ADMM, which yields an RMSE of 1.48 mm and an SSIM of 0.68. Enlarged regions presented in Figure 4D further highlight that ADMM exhibits a tendency to oversmooth embossed strokes and attenuate edge transitions, leading to pronounced phase discontinuities. In contrast, PINN accurately preserves fine features, underscoring its superior performance under high compression ratios. An ablation study on the TV and Hessian regularizations, as well as a comparison between the ADMM framework and the proposed PINN framework with both TV and Hessian regularizations, were conducted to verify the superiority of the proposed PINN method. The corresponding results are presented in the Supplementary materials.
{kind=link}
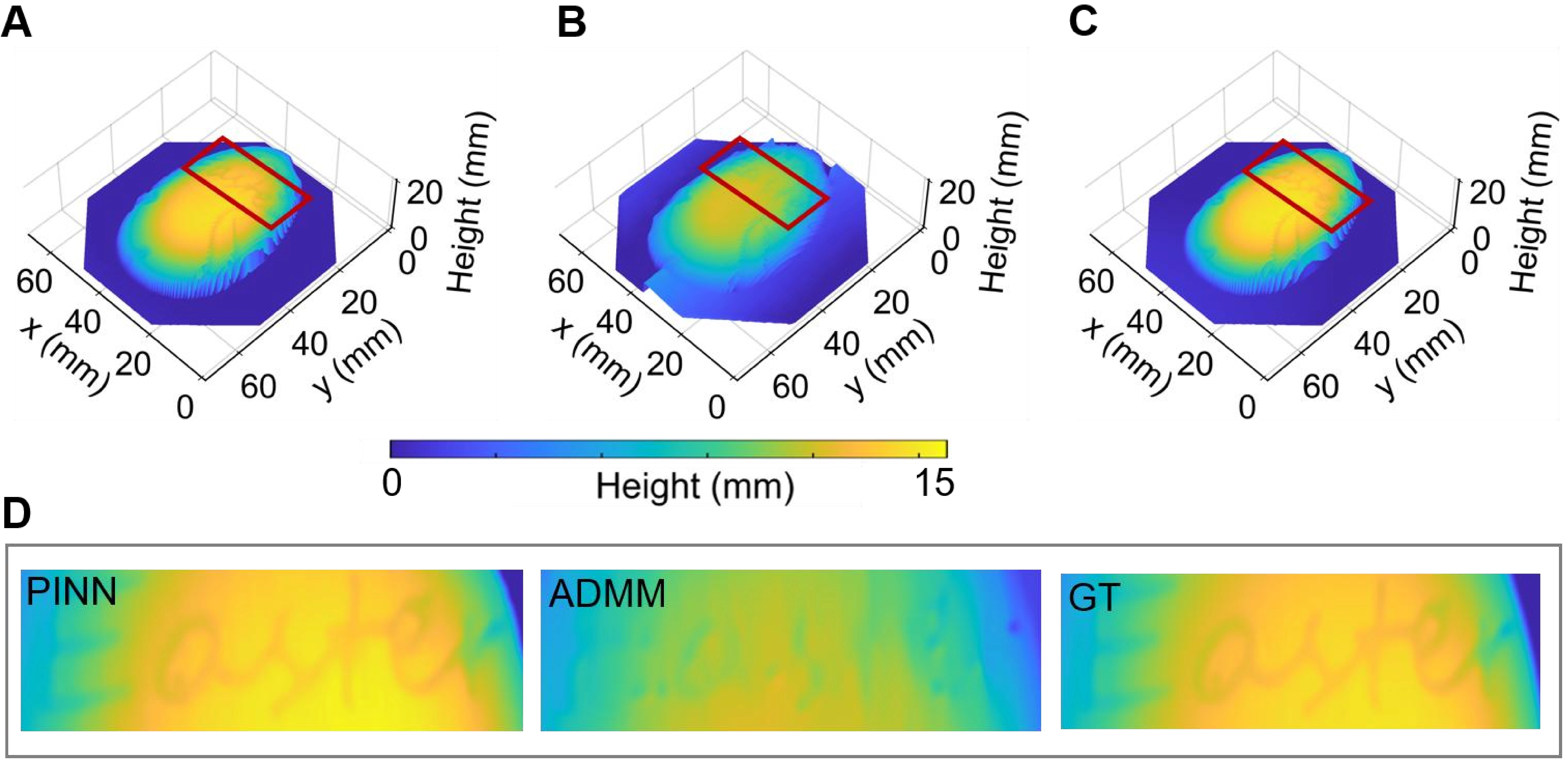
Figure 4. Experimental measurement of a static plaster relief. (A) The profile reconstructed by PINN; (B) The profile reconstructed by ADMM; (C) The ground truth profile; (D) Comparison of enlarged regions highlighted by red squares in (A-C). PINN: physics-informed neural network; ADMM: alternating direction method of multipliers.
To further evaluate the practical performance of PINN-CPSFPP under high-compression acquisition, we first examined a representative translational scene using a corn-shaped plaster statue. Six reconstructed 3D profiles at different time instants are displayed in Figure 5A, showing that the proposed framework can faithfully recover the evolving surface geometry throughout the motion. The recovered profiles remain spatially smooth and geometrically consistent over time, with no obvious motion-induced distortion or structural discontinuity. In particular, the global shape and local surface undulations are both well preserved, indicating that the compressed measurement still contains sufficient information for reliable 3D reconstruction even at a compression ratio of 9. To quantify the motion, a characteristic point on the object was tracked during the motion, and the extracted distance-time data are plotted in Figure 5B. A linear fitting was further performed on the trajectory to estimate the motion velocity, yielding an average translational speed of 0.11 mm/s. These results demonstrate that PINN-CPSFPP can robustly capture continuous rigid-body translation in dynamic 3D metrology.
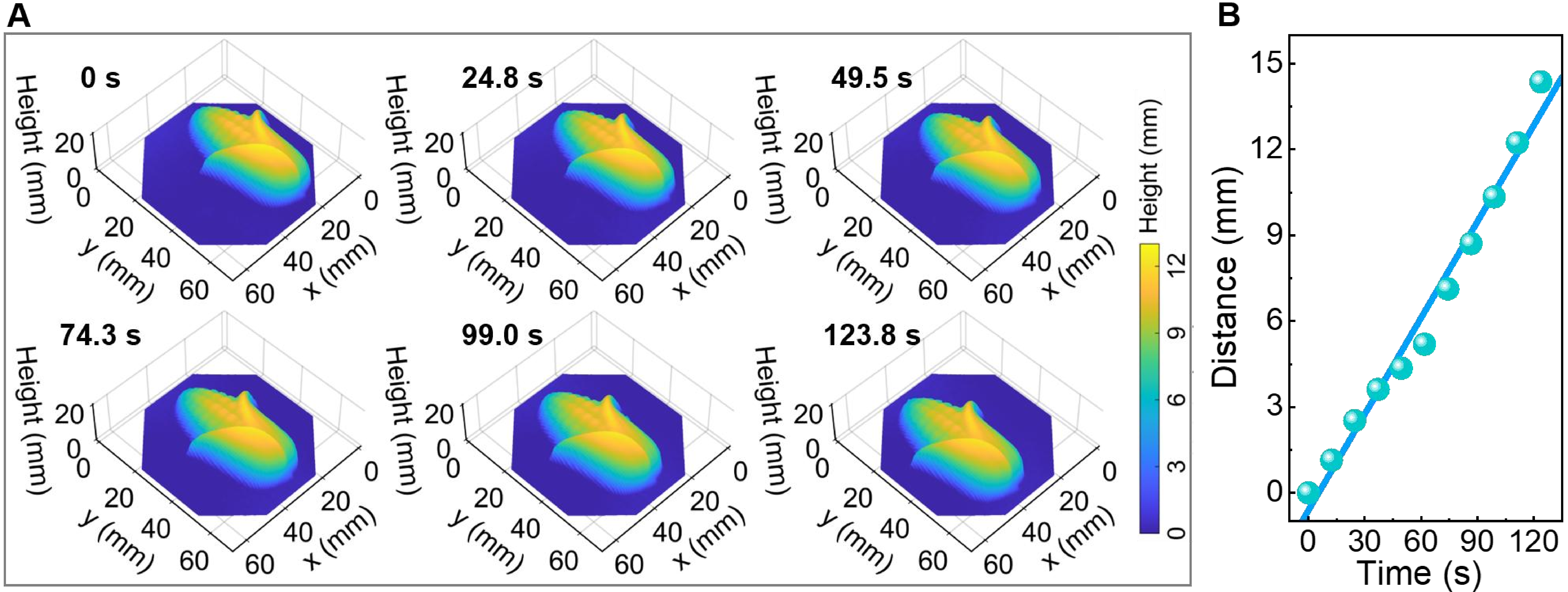{kind=link}
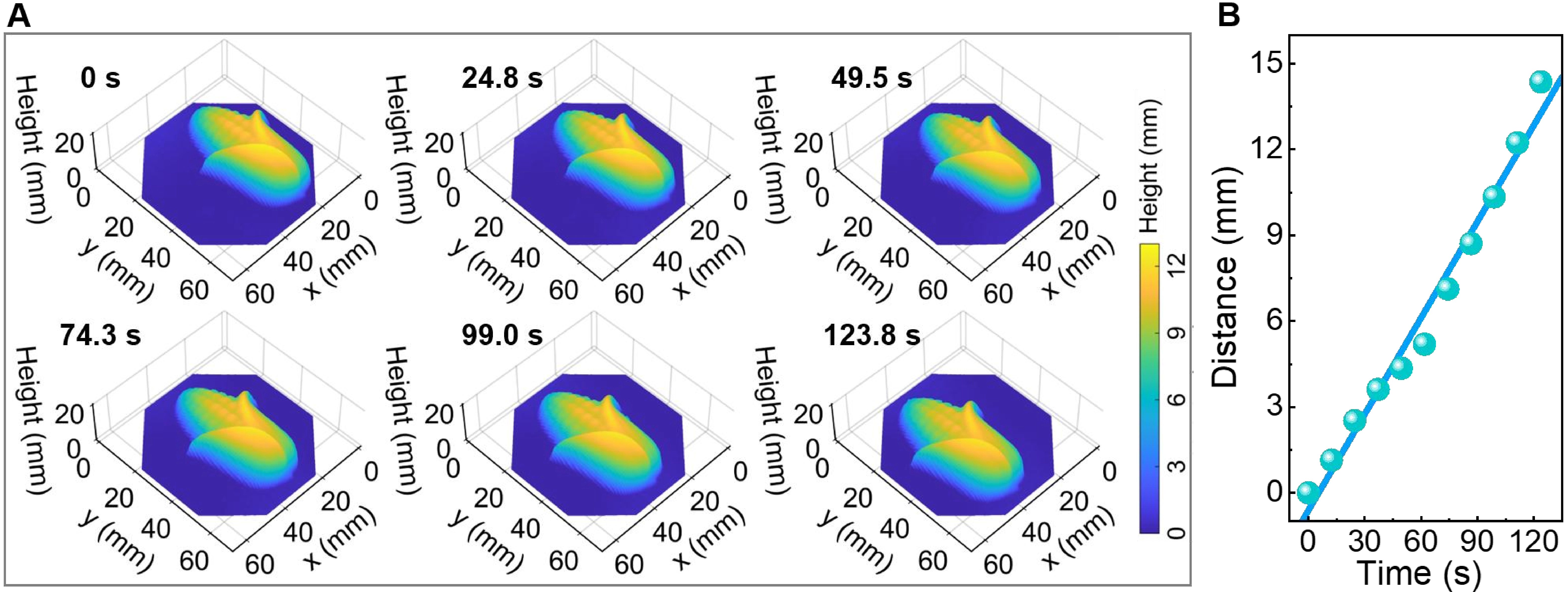
Figure 5. Experimental measurement of a translational corn statue by PINN-CPSFPP. (A) The selected reconstructed profiles at different time instants; (B) Evolution of the positions of the corn statue. PINN: physics-informed neural network; CPSFPP: compressive phase-shifting fringe projection profilometry.
We next tested the method on a rotational scene using a shell-cracked dinosaur statue, as shown in Figure 6A. Compared with pure translation, rotational motion introduces more complex variations in surface orientation and local visibility, making it a more demanding case for compressed 3D reconstruction. Nevertheless, the reconstructed profiles clearly reveal the temporal evolution of the object posture, while preserving the major geometric characteristics of the head and shell contour. No severe deformation or noticeable reconstruction collapse is observed across the selected frames, suggesting that the proposed method remains stable under continuous rotation. To further characterize the rotational dynamics, the angular displacement was extracted from the reconstructed sequence, and the corresponding angle-time trace is presented in Figure 6B. By applying linear fitting to the angle-time curve, the average counterclockwise angular velocity was estimated to be 0.72°/s. This experiment shows that PINN-CPSFPP is also capable of tracking rotational rigid-body dynamics with reliable geometric fidelity under highly compressed measurements.
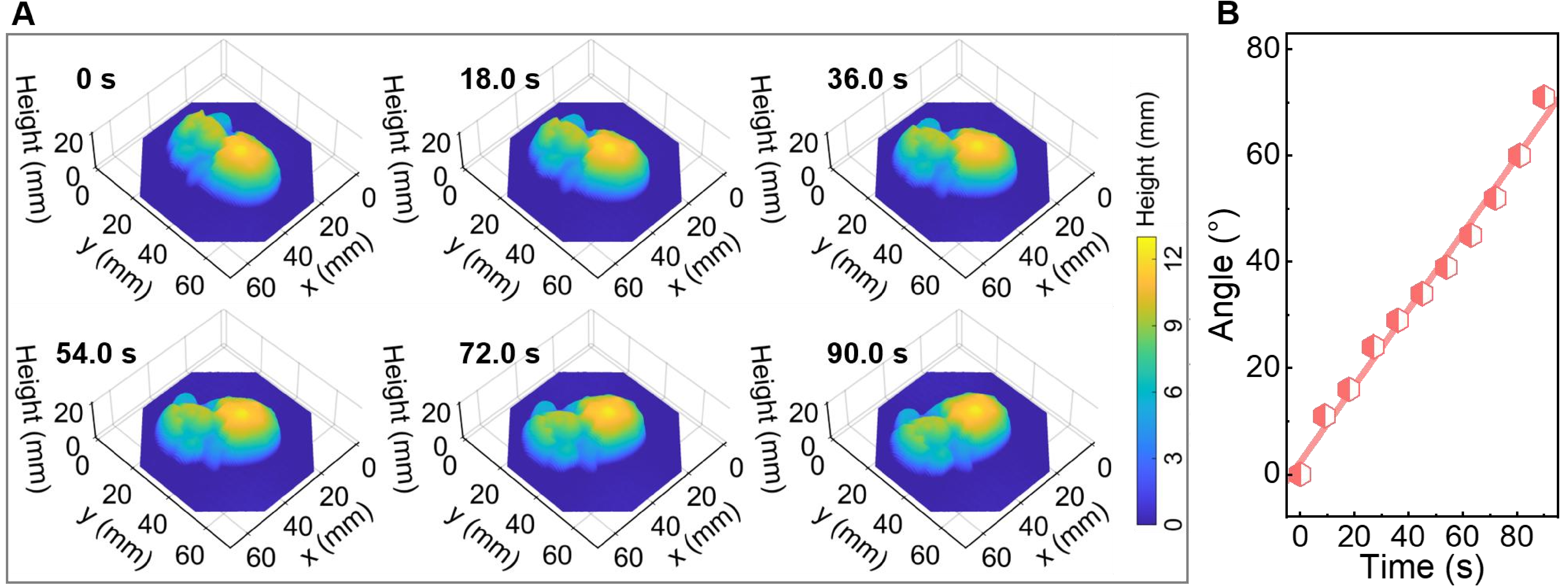{kind=link}
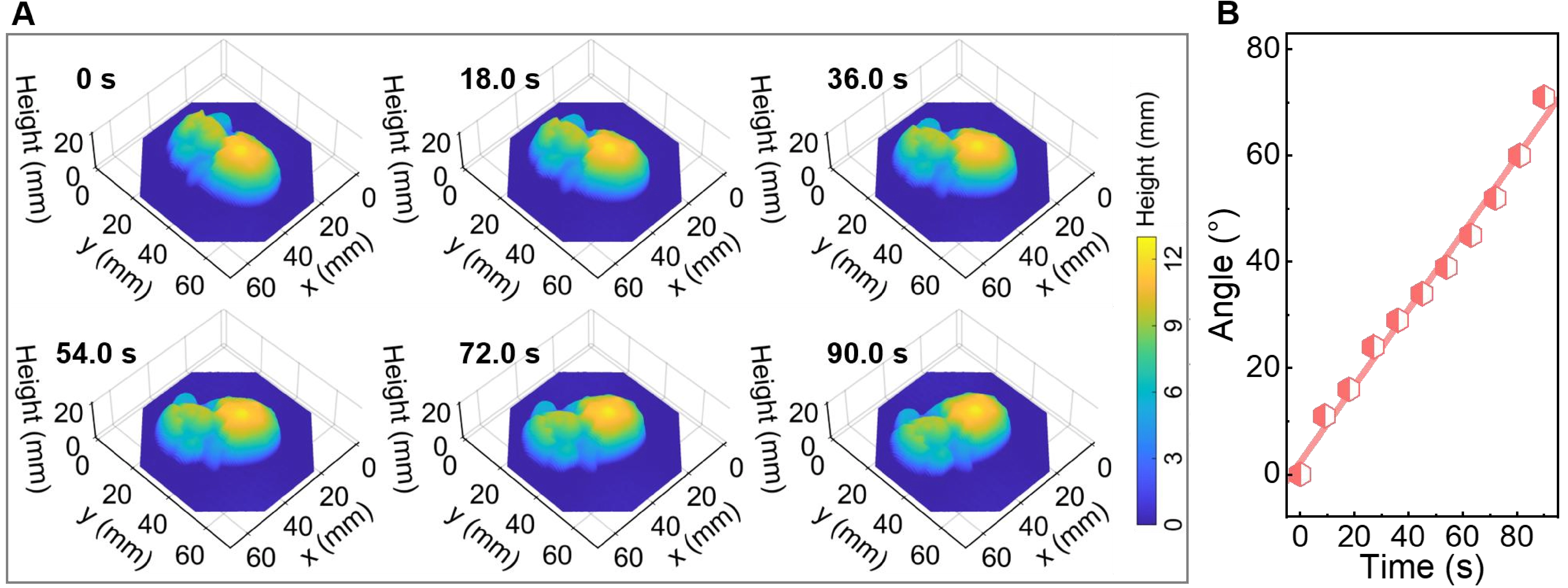
Figure 6. Experimental measurement of a rotational dinosaur statue by PINN-CPSFPP. (A) The selected reconstructed profiles at different time instants; (B) Evolution of the orientations of the dinosaur statue. PINN: physics-informed neural network; CPSFPP: compressive phase-shifting fringe projection profilometry.
To further examine the applicability of PINN-CPSFPP to non-rigid dynamic scenes, we then considered the deformation of a thin membrane driven by a hex wrench, as illustrated in Figure 7A. This experiment is different from rigid-body motion because the object undergoes continuous local shape variation rather than global displacement or rotation. The reconstructed 3D profiles successfully capture the full deformation process, including the progressive formation of the bulged region and its subsequent relaxation after unloading. Notably, the recovered peak area retains a distinct hexagonal imprint that matches the contact geometry of the wrench, indicating that the proposed method is able to preserve localized structural features instead of merely recovering the overall deformation trend. Such fidelity is particularly important for practical applications involving contact mechanics, flexible material evaluation, and localized defect inspection. To quantify the temporal response, the maximum height of the membrane was extracted from the reconstructed 3D sequence, and the resulting height-time trace is shown in Figure 7B. The curve exhibits a clear rise to a maximum followed by a gradual decay, consistent with the expected loading and unloading behavior of the deformable membrane. These results confirm that PINN-CPSFPP is capable of reconstructing not only rigid-body dynamics but also non-rigid, spatially localized deformations under high compression ratios. More details of these motion inspections by PINN-CPSFPP are illustrated in Visualization 1.
{kind=link}
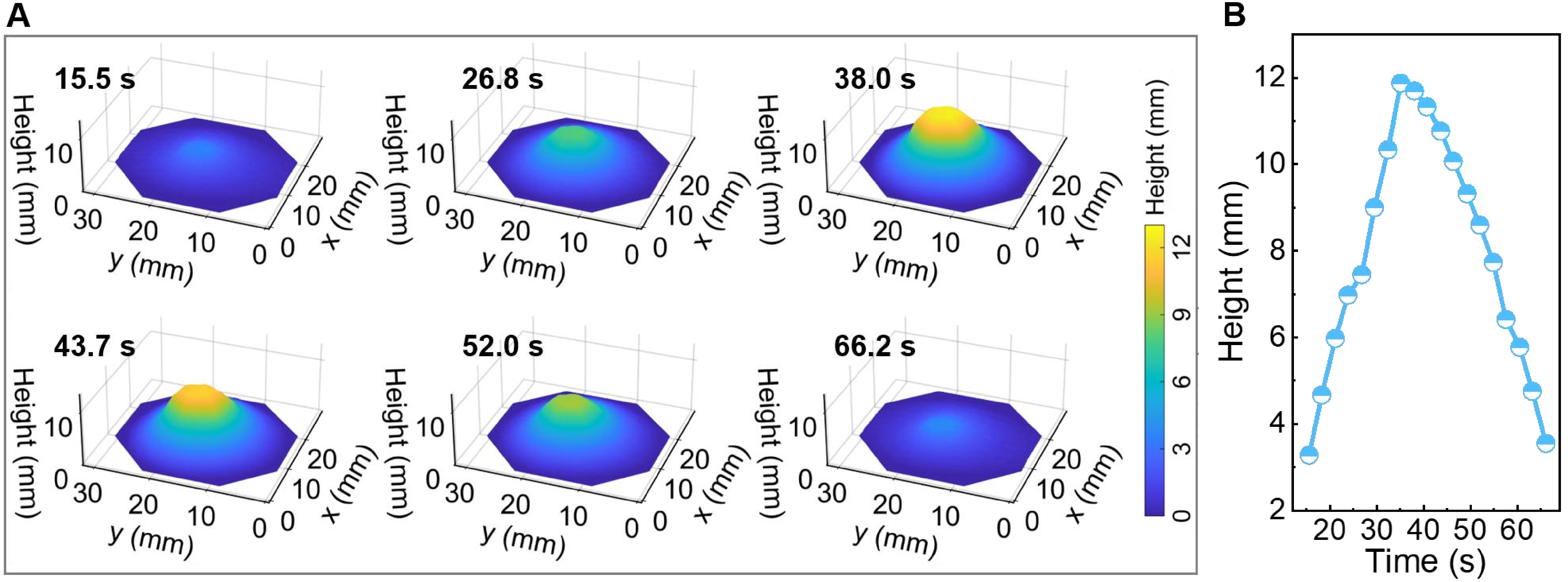
Figure 7. Experimental measurement of a deformed membrane by PINN-CPSFPP. (A) The selected reconstructed profiles at different time points; (B) Evolution of the maximum height of the membrane. PINN: physics-informed neural network; CPSFPP: compressive phase-shifting fringe projection profilometry.
Benefiting from the elaborate design with physical consistency, implicit neural priors, and explicit regularization, PINN-CPSFPP has shown superior performance to previous CPSFPP methods, especially under high compression ratios. Experimental measurements of various dynamic objects further support its viability for diverse 3D profiling applications.
4. Discussion and Conclusion
In conclusion, we have presented a PINN method for CPSFPP which leverages the constraints of the physical model and neural network to ensure high-fidelity reconstruction under high compression ratios. The method achieves a ninefold increase in data acquisition speed, while maintaining high fidelity, which enables high-precision 3D metrology for high-speed scenes. It should be noted that this acceleration mainly results from the reduction in raw data acquisition time enabled by compressive measurements. The increased computational cost associated with the reconstruction process should also be taken into consideration. A key advantage of our approach is that it does not rely on any pre-collected training dataset. Instead, the network is optimized individually for each measurement with the physics-informed loss, which gives the method intrinsically stronger generalization capability than conventional end-to-end supervised methods. Since the reconstruction is not limited to a fixed training distribution, the method can adapt to a broader range of objects, motions, and 3D sensing scenarios. However, this flexibility comes with increased sensitivity to the choice of network parameters and optimization settings. This can be viewed as both a limitation and an advantage: although careful parameter adjustment is required in practice, this adjustability also makes the method more adaptable to diverse measurement tasks and experimental conditions.
Nevertheless, the performance still degrades when the compression ratio becomes excessively large, where the inverse problem is severely ill-conditioned. In the current implementation, our experiments primarily validate the feasibility of high-compression acquisition and dynamic profile recovery using a cost-effective hardware setup. However, the maximum measurable speed of the target object remains constrained by the hardware specifications, specifically the optical power, pattern switching rate, and camera frame rate. Employing laser interferometric illumination or high-power DLP sources to enhance fringe contrast and improve the signal-to-noise ratio of compressed measurements would be beneficial for achieving both higher reconstruction fidelity and better temporal resolution. In the future, this framework can be extended to single-step profilometry, which would directly recover the height map from compressed measurements using physics-informed networks. Furthermore, the present work is not limited to the current experimental configuration but has clear potential for achieving higher spatiotemporal resolution. With the capability of reducing the required data acquisition burden, PINN-CPSFPP can be further adapted to application scenarios requiring high-speed 3D measurement[61], real-time 3D measurement[62], and on-line 3D inspection[63]. With continued developments in single-shot fringe analysis, physics-constrained deep neural networks, and high-performance hardware, PINN-CPSFPP is expected to become applicable to non-repetitive transient processes, and even ultrafast 3D observation. This also holds promise for a broad range of practical scenarios, including high-speed vibration measurement, deformable material analysis, dynamic characterization of micro/nanostructures, and real-time inspection of complex industrial targets.
Supplementary material
The supplementary material for this article is available at: Supplementary materials.
Authors contribution
Cheng B: Data curation, investigation, methodology, writing-original draft.
Yao Y: Conceptualization, formal analysis, funding acquisition, writing-review & editing.
He Y, Guo M, Ma H: Software, validation, visualization.
Qi D, Shen Y, Deng L: Funding acquisition, validation.
Sun Z, Zhang S: Supervision, resources, funding acquisition, project administration.
Conflicts of interest
The authors declare no conflicts of interest.
Ethical approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Availability of data and materials
Data supporting the findings of this study are available from the supplementary materials and the corresponding authors upon reasonable request.
Funding
This work was partially supported by the National Natural Science Foundation of China (Grant Nos. 12325408, 12274129, 12521003, 12374274, 12274139, 12574323, and 12474404).
Copyright
© The Author(s) 2026.
References
-
1. Gorthi SS, Rastogi P. Fringe projection techniques: Whither we are? Opt Lasers Eng. 2010;48(2):133-140.[DOI]
-
2. Xu J, Zhang S. Status, challenges, and future perspectives of fringe projection profilometry. Opt Lasers Eng. 2020;135:106193.[DOI]
-
3. Zhong K, Li Z, Zhou X, Li Y, Shi Y, Wang C. Enhanced phase measurement profilometry for industrial 3D inspection automation. Int J Adv Manuf Technol. 2015;76:1563-1574.[DOI]
-
4. Stanco F, Battiato S, Gallo G. Digital imaging for cultural heritage preservation. Boca Raton: CRC Press; 2011. Available from: https://www.routledge.com/Digital-Imaging-for-Cultural-Heritage-Preservation-Analysis-Restoration-and-Reconstruction-of-Ancient-Artworks/Stanco-Battiato-Gallo/p/book/9781138073791
-
5. Sansoni G, Trebeschi M, Docchio F. State-of-the-art and applications of 3D imaging sensors in industry, cultural heritage, medicine, and criminal investigation. Sensors. 2009;9(1):568-601.[DOI]
-
6. Takeda M, Mutoh K. Fourier transform profilometry for the automatic measurement of 3-D object shapes. Appl Opt. 1983;22(24):3977-3982.[DOI]
-
7. Takasaki H. Moiré topography. Appl Opt. 1970;9(6):1467.[DOI]
-
8. Li C, Cao Y, Wang L, Wan Y, Li H, Xu C, et al. Computer-generated moiré profilometry based on fringe-superposition. Sci Rep. 2020;10:17202.[DOI]
-
9. Zhang H, Cao Y, Li H, Xu C, An H, Wu H, et al. Real-time computer-generated frequency-carrier Moiré profilometry with three-frequency heterodyne temporal phase unwrapping. Opt Laser Technol. 2023;161:109201.[DOI]
-
10. Su L, Su X, Li W, Xiang L. Application of modulation measurement profilometry to objects with surface holes. Appl Opt. 1999;38(7):1153-1158.[DOI]
-
11. Wei Z, Cao Y, Wu H, Xu C, Ruan G, Wu F, et al. Dynamic phase-differencing profilometry with number-theoretical phase unwrapping and interleaved projection. Opt Express. 2024;32(11):19578.[DOI]
-
12. Li S, Su X, Chen W, Xiang L. Eliminating the zero spectrum in Fourier transform profilometry using empirical mode decomposition. J Opt Soc Am A. 2009;26(5):1195-1201.[DOI]
-
13. Huang PS. High-resolution, real-time three-dimensional shape measurement. Opt Eng. 2006;45(12):123601.[DOI]
-
14. Zhang S. High-speed 3D shape measurement with structured light methods: A review. Opt Lasers Eng. 2018;106:119-131.[DOI]
-
15. Qin J, Jiang Y, Cao Y, Wu H. Single-shot phase-shifting composition fringe projection profilometry by multi-attention fringe restoration network. Neurocomputing. 2025;634:129908.[DOI]
-
16. Tan J, Niu H, Su W, He Z. Structured light 3D shape measurement for translucent media base on deep Bayesian inference. Opt Laser Technol. 2025;181:111758.[DOI]
-
17. Srinivasan V, Liu HC, Halioua M. Automated phase-measuring profilometry of 3-D diffuse objects. Appl Opt. 1984;23(18):3105-3108.[DOI]
-
18. Zuo C, Feng S, Huang L, Tao T, Yin W, Chen Q. Phase shifting algorithms for fringe projection profilometry: A review. Opt Lasers Eng. 2018;109:23-59.[DOI]
-
19. Lei S, Zhang S. Flexible 3-D shape measurement using projector defocusing. Opt Lett. 2009;34(20):3080-3082.[DOI]
-
20. Zhang S, Van Der Weide D, Oliver J. Superfast phase-shifting method for 3-D shape measurement. Opt Express. 2010;18(9):9684-9689.[DOI]
-
21. Hyun JS, Chiu GTC, Zhang S. High-speed and high-accuracy 3D surface measurement using a mechanical projector. Opt Express. 2018;26(2):1474-1487.[DOI]
-
22. Heist S, Lutzke P, Schmidt I, Dietrich P, Kühmstedt P, Tünnermann A, et al. High-speed three-dimensional shape measurement using GOBO projection. Opt Lasers Eng. 2016;87:90-96.[DOI]
-
23. Feng S, Chen Q, Gu G, Tao T, Zhang L, Hu Y, et al. Fringe pattern analysis using deep learning. Adv Photon. 2019;1(2):1.[DOI]
-
24. Li Y, Qian J, Feng S, Chen Q, Zuo C. Composite fringe projection deep learning profilometry for single-shot absolute 3D shape measurement. Opt Express. 2022;30(3):3424-3442.[DOI]
-
25. Li Y, Qian J, Feng S, Chen Q, Zuo C. Deep-learning-enabled dual-frequency composite fringe projection profilometry for single-shot absolute 3D shape measurement. Opto-Electron Adv. 2022;5(5):210021.[DOI]
-
26. Chen W, Liu Y, Feng S, Yin W, Qian J, Li Y, et al. Dual-frequency angular-multiplexed fringe projection profilometry with deep learning: Breaking hardware limits for ultra-high-speed 3D imaging. Opto-Electron Adv. 2025;8(9):250021.[DOI]
-
27. Yin W, Che Y, Li X, Li M, Hu Y, Feng S, et al. Physics-informed deep learning for fringe pattern analysis. Opto-Electron Adv. 2024;7(1):230034.[DOI]
-
28. Yu H, Han B, Bai L, Zheng D, Han J. Untrained deep learning-based fringe projection profilometry. APL Photonics. 2022;7:016102.[DOI]
-
29. Yuan X, Brady DJ, Katsaggelos AK. Snapshot compressive imaging: Theory, algorithms, and applications. IEEE Signal Process Mag. 2021;38(2):65-88.[DOI]
-
30. Huang Z, Yao Y, He Y, He Y, Jin C, Guo M, et al. Faster structured illumination microscopy using complementary encoding-based compressive imaging. Photon Res. 2024;12(4):740-748.[DOI]
-
31. He Y, Yao Y, Qi D, Wang Z, Jia T, Liang J, et al. High-speed super-resolution imaging with compressive imaging-based structured illumination microscopy. Opt Express. 2022;30(9):14287-14299.[DOI]
-
32. Qi D, Zhang S, Yang C, He Y, Cao F, Yao J, et al. Single-shot compressed ultrafast photography: A review. Adv Photon. 2020;2(1):1.[DOI]
-
33. Wagadarikar A, John R, Willett R, Brady D. Single disperser design for coded aperture snapshot spectral imaging. Appl Opt. 2008;47(10):B44-B51.[DOI]
-
34. Llull P, Liao X, Yuan X, Yang J, Kittle D, Carin L, et al. Coded aperture compressive temporal imaging. Opt Express. 2013;21(9):10526.[DOI]
-
35. Cheng B, Yao Y, He Y, Huang Z, Guo M, Cao J, et al. Compressive phase-shifting fringe projection profilometry for accelerating 3D metrology. Opt Lett. 2025;50(9):2942.[DOI]
-
36. Boyd S, Parikh N, Chu E, Peleato B, Eckstein J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found Trends Mach Learn. 2011;3(1):1-122.[DOI]
-
37. Lempitsky V, Vedaldi A, Ulyanov D. Deep image prior. In: Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition; 2018 June 18-22; Salt Lake City, USA. Piscataway: IEEE; 2018. p. 9446-9454.[DOI]
-
38. Liu S, Meng X, Yin Y, Wu H, Jiang W. Computational ghost imaging based on an untrained neural network. Opt Lasers Eng. 2021;147:106744.[DOI]
-
39. Li H, Chen X, Chi Z, Mann C, Razi A. Deep DIH: Single-shot digital in-line holography reconstruction by deep learning. IEEE Access. 2020;8:202648-202659.[DOI]
-
40. He Y, Yao Y, He Y, Huang Z, Qi D, Zhang C, et al. Untrained neural network enhances the resolution of structured illumination microscopy under strong background and noise levels. Adv Photon Nexus. 2023;2(4):046005.[DOI]
-
41. Wang Y, Yang J, Yin W, Zhang Y. A new alternating minimization algorithm for total variation image reconstruction. SIAM J Imaging Sci. 2008;1(3):248-272.[DOI]
-
42. Huang X, Fan J, Li L, Liu H, Wu R, Wu Y, et al. Fast, long-term, super-resolution imaging with Hessian structured illumination microscopy. Nat Biotechnol. 2018;36(5):451-459.[DOI]
-
43. Ghulyani M, Skariah DG, Arigovindan M. Generalized hessian-schatten norm regularization for image reconstruction. IEEE Access. 2022;10:58163-58180.[DOI]
-
44. Kofler A, Altekrüger F, Antarou Ba F, Kolbitsch C, Papoutsellis E, Schote D, et al. Learning regularization parameter-maps for variational image reconstruction using deep neural networks and algorithm unrolling. SIAM J Imaging Sci. 2023;16(4):2202-2246.[DOI]
-
45. Chen K, Xi J, Yu Y. Quality-guided spatial phase unwrapping algorithm for fast three-dimensional measurement. Opt Commun. 2013;294:139-147.[DOI]
-
46. Lu Y, Wang X, He G. Phase unwrapping based on branch cut placing and reliability ordering. Opt Eng. 2005;44(5):055601.[DOI]
-
47. Jiang H, Xu Y, Zhang C, Xu Z, Huang J, Tan H, et al. An algorithm combining the branch-cut method and rhombus phase unwrapping algorithm. J Phys Conf Ser. 2020;1634(1):012068.[DOI]
-
48. Xu C, Cao Y, Wu H, Li H, Zhang H, An H. Curtain-type phase unwrapping algorithm. Opt Eng. 2022;61(4):044103.[DOI]
-
49. Yang R, Pollinger F, Meiners-Hagen K, Tan J, Bosse H. Heterodyne multi-wavelength absolute interferometry based on a cavity-enhanced electro-optic frequency comb pair. Opt Lett. 2014;39(20):5834.[DOI]
-
50. Wu Z, Guo W, Zhang Q. High-speed three-dimensional shape measurement based on shifting Gray-code light. Opt Express. 2019;27(16):22631.[DOI]
-
51. Wang L, Cao Y, An H. Gray-code fringe order jump error self-correction based on shifted phase encoding for phase measuring profilometry. Opt Commun. 2022;524:128763.[DOI]
-
52. Wang J, Cao Y, Wu H, Wei Z. Absolute phase retrieval based on fringe amplitude encoding without any additional auxiliary pattern. Opt Express. 2023;31(25):41952.[DOI]
-
53. Lee YH, Sohn SD. Optical implementation of orthogonal phase-code multiplexing. Opt Lett. 2001;26(24):1990.[DOI]
-
54. An H, Cao Y, Li H, Zhang H. High-speed 3-D reconstruction based on phase shift coding and interleaved projection. Expert Syst Appl. 2023;234:121067.[DOI]
-
55. Wu F, Cao Y, An H, Wei Z. Dynamic three-dimensional reconstruction with phase shift coding division multiplexing. Sens Actuators A Phys. 2024;379:115847.[DOI]
-
56. Luo J, Cao Y, Wang J. Absolute phase retrieval based on phase-intensity hybrid encoding without any additional pattern. Opt Lasers Eng. 2025;190:108968.[DOI]
-
57. Li Y, Cao Y, Ran L. Spatial symmetric multi-level coding absolute phase retrieval for color 3D real-time measurement. Measurement. 2026;257:119017.[DOI]
-
58. Qin J, Jiang Y, Cao Y. Order-shifting temporal phase unwrapping for high-fidelity dynamic 3-D measurement. IEEE Trans Instrum Meas. 2026;75:5000513.[DOI]
-
59. Liu X, Lyu F, Chen L, Li C, Zu S, Wang B. Seismic random noise suppression based on deep image prior and total variation. IEEE Trans Geosci Remote Sens. 2024;62:5908311.[DOI]
-
60. Devalla SK, Renukanand PK, Sreedhar BK, Subramanian G, Zhang L, Perera S, et al. DRUNET: A dilated-residual U-Net deep learning network to segment optic nerve head tissues in optical coherence tomography images. Biomed Opt Express. 2018;9(7):3244.[DOI]
-
61. Zuo C, Tao T, Feng S, Huang L, Asundi A, Chen Q. Micro Fourier Transform Profilometry (μFTP): 3D shape measurement at 10,000 frames per second. Opt Lasers Eng. 2018;102:70-91.[DOI]
-
62. Yin W, Zhao H, Ji Y, Deng Z, Jin Z, Feng S, et al. High-resolution, wide-field-of-view, and real-time 3D imaging based on spatial-temporal speckle projection profilometry with a VCSEL projector array. ACS Photonics. 2024;11(2):498-511.[DOI]
-
63. Leach RK, Bourell D, Carmignato S, Donmez A, Senin N, Dewulf W. Geometrical metrology for metal additive manufacturing. CIRP Ann. 2019;68(2):677-700.[DOI]
Copyright
© The Author(s) 2026. This is an Open Access article licensed under a Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, sharing, adaptation, distribution and reproduction in any medium or format, for any purpose, even commercially, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
Publisher’s Note
Science Exploration remains a neutral stance on jurisdictional claims in published
maps
and institutional affiliations. The views expressed in this article are solely those
of
the author(s) and do not reflect the opinions of the Editors or the publisher.
Share And Cite



Science Exploration Style
Cheng B, Yao Y, He Y, Guo M, Ma H, Qi D, et al. Physics-informed neural network enabled high-fidelity compressive phase-shifting fringe projection profilometry. Light Manip Appl. 2026;1:202613. https://doi.org/10.70401/lma.2026.0014
Tips
Copy completed.
Submit a Manuscript
Author Instructions
Cite this Article
Article Metrics
0
View
0
Download
Cited
Article Updates

Science Exploration Style
Cheng B, Yao Y, He Y, Guo M, Ma H, Qi D, et al. Physics-informed neural network enabled high-fidelity compressive phase-shifting fringe projection profilometry. Light Manip Appl. 2026;1:202613. https://doi.org/10.70401/lma.2026.0014
copy
Share Link
copy